A mechanically validated open-source silicone model for the training of gastric perforation sewing
Lukas Warnung, Stefan Sattler, Elmar Haiden, Sophie Schober, Dieter Pahr & Andreas Reisinger
BMC Medical Education volume 23, Article number: 261 (2023)
背景
消化管穿孔は救急外来でよく見られる。胃の穿孔は緊急事態であり、直ちに外科的治療が必要です。必要な外科的技術は、定期的な実践的トレーニングが必要です。患者の安全性を考慮すると、医療現場での生体内トレーニングの機会は限られています。外科手術のトレーニングには、動物組織、特に豚の組織が一般的に使用されています。しかし、動物組織には限界があるため、人工的なトレーニングモデルを使用することが推奨されています。多くの人工モデルが市販されていますが、胃壁の触感と縫製特性を同時に模倣したものは、私たちの知る限りではありません。本研究では、胃縫合のトレーニングのために、オープンソースの胃穿孔のシリコンモデルを開発し、リアルな触覚と縫合の挙動を提供しようと試みた。

*ブタ胃壁の非縫合層と縫合層の区別。図のように、漿膜で覆われた筋層(=縫合されている層;黒矢印)と粘膜(縫合されていない層;オレンジ矢印)が区別できる。
研究方法
人間の胃の層構造をシミュレートするために、異なるシリコン素材を用いて、3種類のモデルレイアップを製作しました。製造工程は、再現性を高めるため、できるだけシンプルにしました。最も現実的なモデルを特定するために、これらのシリコーンモデルと実際の豚の胃を比較するために、針刺しセットアップと体系的な触覚評価を開発しました。
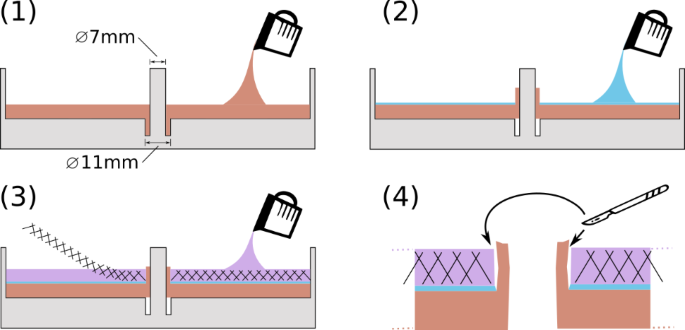
*模式的な製作工程: ステップ(1): ステップ(1):鋳型にオイルを塗布した後、第1層を鋳造する。ステップ(2): ステップ(2):鋳型内で第1層を反転させ、第2層を鋳造する(モデルAのみ)。ステップ(3): フォームを導入し、第III層を鋳造する。PUフォームは別途用意し(シリコーンに浸す)、前の層の上に置くことも可能です。ステップ(4):硬化後、モデルを型からはずす。層IIとIIIの側壁からメスで突起を切り離したところ
結果
その結果、3層からなるシリコーンモデルが最も有望であることがわかり、臨床外科医によるテストが行われた。
本プロジェクトの目的は、手術手技のトレーニングに使用できる、低コストな胃穿孔のシリコーンモデルを開発することです。3種類のモデルを作成し、主観的な触覚テストと客観的な機械的針刺しテストを行い、シリコーンモデルが実際の胃壁をどれだけ忠実に模倣しているかを評価しました。その結果、シリコーンモデルAは死体のブタ胃に最も似ており、一般的な外科手術のトレーニングに使用すべきであり、シリコーンモデルBはより精密な貫通挙動に適していることがわかりました。
シリコーンモデルの製作工程は、低予算の3Dプリンターと手頃なシリコーン材料を使用し、費用対効果が高く簡単です。触覚評価では、粘膜下層を模した薄いシリコーン層を持ち、粘膜と外膜の間の横方向の弾性スライドを可能にするモデルAを支持しました。針入性テストでは、全体的な好みがはっきり出ませんでしたが、ローディングパートでは、ブタの胃に最も近いモデルとしてシリコーンモデルBが、アンローディングパートではモデルAおよびCが支持されました。
本研究の限界としては、ブタの胃を基準として、その機械的特性がヒトの胃に近いと仮定し、胃内の変化する構造、血管、その他の胃の小さな構造を無視することが挙げられます。さらに、すべての試験はin vitroで行われ、異なる縫合材を用いた試験は結果に影響を与える可能性があります。これらの制限にもかかわらず、新しく開発されたシリコンモデルAは、胃穿孔手術の一般的なトレーニングに有益に使用することができ、機械的試験と並んで触覚的考察は、解剖学的トレーニングモデルの特徴づけとランク付けに有益な方法です。